- 机器学习真的可行吗
- 霍夫丁不等式(Hoeffding’s inequality)
- 单假设函数下的错误率验证
- 多假设函数下的错误率验证
- 无限大假设函数下机器学习的可行性
- The VC Dimension
- Noise and Error
- 参考文章
机器学习真的可行吗
机器学习只有在加上一定的假设条件才是可行的。例如下图
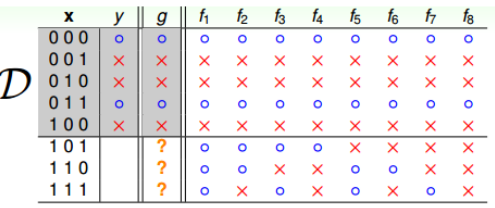
尽管我们的假设函数g可以完美的预测前五个数据,但是对于后三个数据我们的预测并不一定成立,总能找到一个f,使得$f\approx g$不成立。
在D以外的数据中更接近目标函数似乎是做不到的,只能保证对D有很好的分类效果。机器学习的这种特性被称为No Free Lunch(没有免费午餐)。因此NFL特性告诉我们,我们只有加上一定的假设函数才能保证机器学习算法在D之外的数据集上一定能分类或预测成功。
霍夫丁不等式(Hoeffding’s inequality)
以瓶中小球的概率,我们引出霍夫丁不等式,其中,从罐子中随即取出N个球,作为样本。
这N个球中橙色球的比例为u,罐中橙球的比例为v。
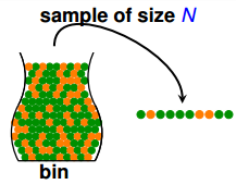
通过霍夫丁不等式推出, u与v接近。
\[\mathbb{P}[\vert v-u\vert > \epsilon ] \leq 2exp(-2\epsilon^2N)\]我们称$u=v$是PAC(probably approximately correct)的
单假设函数下的错误率验证
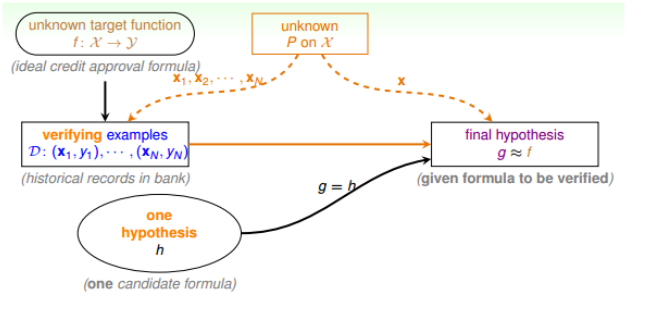
将机器学习问题类比到罐子问题,我们也可以得到相同的结论
-
从 罐子中取出的弹球 –> 训练样本D
-
橙色小球 –> h(x)与f不相等
-
绿色小球 –> h(x)与f相等
同时,我们定义一些参数:
-
分类器的实际错误率:$E_{out}(h) =P(h(x) \neq f(x)) = \mathop{\epsilon} \limits_{X \sim P}\left[\left\vert h(x) \neq f(x)\right \vert \right]$。
-
分类器在抽出样本中的错误率: $E_{in}(h) =P(h(x) \neq f(x)) =\frac{1}{N}\sum \limits_{n=1}^N\left[\left \vert h(x) \neq f(x)\right\vert \right]$。
因此,我们利用霍夫丁不等式,可以得到:
\[\mathbb{P}\left[\left \vert E_{in}(h)-E_{out}(h)\right \vert>\epsilon\right]\le2exp\left(-2\epsilon^2N\right)\]即这个不等式表明, $E_{in}(h) = E_{out}(h)$也是PAC的。
但是这并不意味着,当$E_{in}(h) \approx E_{out}(h)$的时候,$g\approx f$, 因为,这并不能保证$E_{in}(h)$足够小,如果我们的预测的h的错误率很大,这显然不是一个好的选择。所以,我们一般会通过学习算法A,选择最好的h, 使$E_{in}(h)$足够小。 从而保证$E_{out}(h)$很小。为了得到最小的$E_{in}(h)$, 我们添加的验证过程。
多假设函数下的错误率验证
上一个我们仅仅是针对单一的假设h,而且通过霍夫丁不等式可以得出$E_{in}(h) \approx E_{out}(h)$。但是在实际工程中,假设并不仅仅一个,所以,哪怕$E_{in}(h) \neq E_{out}(h)$的概率再小,随着h数量的增加,总有可能出现。
以投硬币为例,150人抛硬币,每人抛5次,其中至少有一个人连续五次都是正面的可能性为:
\[1 - (\frac{31}{32})^{150} > 99\%\]我们称这个现象为BAD sample,如果我们以正面为$E_{in}(h)$, 那么可见$E_{in}(h) = 0$, 但他对于真实现象不具有代表性。而这种情况对机器学习的伤害也是巨大的。
那么在机器学习过程中,如果BAD sample的可能性很小,我们也可以在一定程度上保证机器学习的可能性。
我们假设假设函数之间是没有交集的,那么在有限的假设函数下,根据union bound规则。我们可以推导出
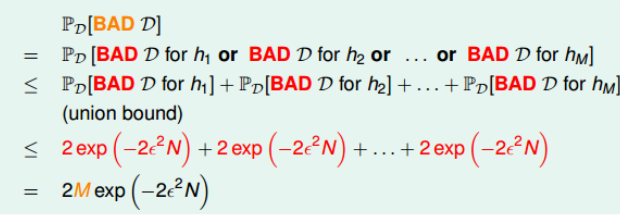
所以在有限M个的假设函数,并且N足够大,那么演算法A随即选择的一个g,都有足够的概率保证$E_{in}(h)\approx E_{out}(h)$。因此,我们只需要找到一个g,保证$E_{in} \approx 0$即可。
无限大假设函数下机器学习的可行性
有限个假设函数下,霍夫丁不等式为:
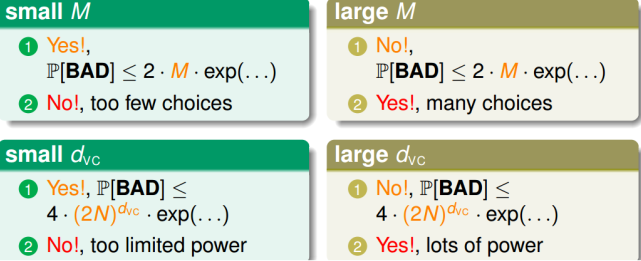
\[\mathbb{P}[\vert E_{in}(g)-E_{out}(g) > \epsilon] \le 2 *M*exp(-2\epsilon^2N)\]但是我们的推导过程中
\[\mathbb{P}[B_1 \ or \ B_2 ... B_M] \le P[B_1] + P[B_2] + ... +P[B_M]\]如果$M=\infty$,上面不等式右边的值将会很大,但是这个推导过程中,我们假设了各个假设函数之间没有交集,实际上,很多情况下是有交集的。
因此,如果我们找出交集,将其分为有限个类别。那么也可以保证机器学习的可行性
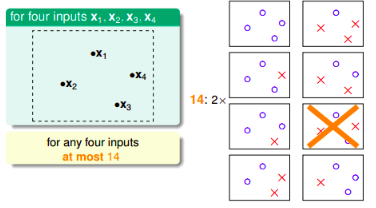
对于二分类问题,我们的,一个训练样本的结果只有-1和+1, 因此最多的分类最多有$2^N$个,但是,随着N的增加,其分类还要小于$2^N$, 例如当N=4时,其最多有14类。
我们定义effective(N)为N个点的最多分类情况,那么霍夫丁不等式可以写作
\[\mathbb{P}[\vert E_{in}(g)-E_{out}(g) > \epsilon] \le 2 *effective(N)*exp(-2\epsilon^2N)\]已知$effective(N) < 2^N$,如果能够保证$effective(N) \ll 2^N$, 那么就可以保证右边接近于0。
Effective Number of Hypothesis
再次提出两个参数:
- 二分类(dichotomy)。就是将空间中的点用一条直线分为正类和负类。dichotomy H就是平面上能将点完全用直线分类的直线种类,在上面可以推知,他最大为$2^N$。我们的研究目标就是使用dichotomy代替M。
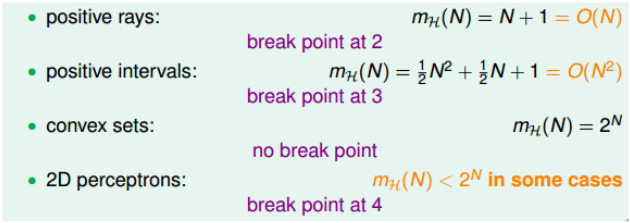
- 成长函数(growth function): 记为$m_H(N)$。对于由N个点组成的不同集合中,某集合对应的dichotomy最大,那么这个dichotomy值就是$m_H(N)$。$m_H(N) = \max\limits_{x_1, x_2, ..x_n\in \chi}\vert H(x_1, x_2, .., x_n)\vert$。
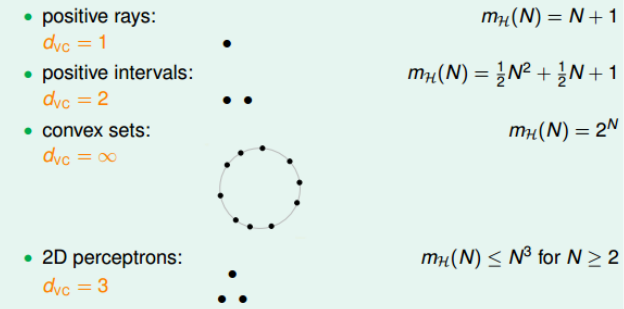
例如

其中,前两个是多项式的,可以使用$m_H(N)$来替代M,而convex sets是不满足的。现在需要探讨2D perceptrons是多项式还是指数形式的。
break point
再次定义一个参数:
- break point: 满足$m_H(N) \neq 2^N$的N的最小值就是break point, 称为k。
因此,上述四种情况的break point为:
Bounding Function: Basic Cases
影响$m_H(N)$的参数有N和break point k。
因此定义一个参数:
- bounding function:B(N, k),当break point为k时,成长函数$m_H(N)$可能的最大值, 即B(N, k)是$m_H(N)$ 的上届。
因此新目标为$B(N, k) \le poly(N)$
对于B(N, k)有知
- 当k=1, B(N, k) = 1。
- 当N<k时, $B(N, k) = 2^k$。
- 当N=k时, $B(N, k) = 2^k-1$。
- 当N>k时,$B(N, k) \le B(N-1, k) + B(N-1, k-1)$。
综上,可得:
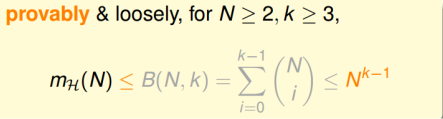
\[B(N, k) \le \sum_{i=1}^{k-1}\binom{N}{i}\]那么上述不等式右边最高阶为k-1的N多项式,因此B(N, k)的上届满足多项式poly(N)。 即:
\[m_H(N) \le B(N, k) \le poly(N)\]现在就可以将$m_H(N)$来替代M了。即,我们想要:

实际上的表达式经过经过推导为:

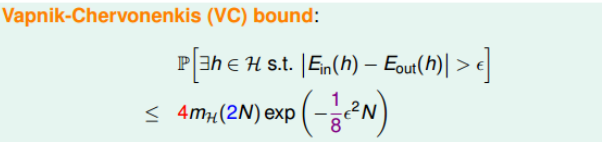
最终,我们通过引入成长函数$m_H$,得到了一个新的不等式,称为 VC bound:
The VC Dimension
我们知道如果一个假设空间H对于采样样本D有break point k,那么他的成长函数是有界的,他的上届成为bound function。而bound function也是有界的,其上届为$N^{k-1}$,且,$N^{k-1}$比$B(N, k)$松弛的多。
因此,VC bound可以转换为: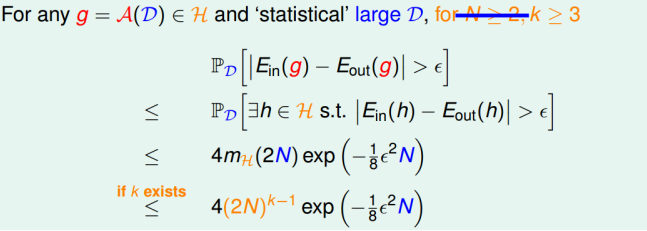
因此,不等式只与N和k有关了,一般N足够大,所以只考虑k值。
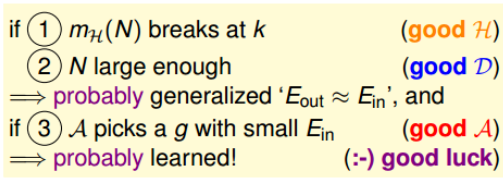
- 若假设空间H有break point k,且N足够大,则根据VC bound理论,算法有良好的泛化能力
- 在假设空间中选择一个矩g,使$E_{in}\approx 0$,则其在全集数据中的错误率会较低
VC Dimension
定义一个新的名词:
- VC dimension: 指某假设集H能够shatter的最多inputs的个数,即最大完全正确的分类能力,即为$d_{vc}$。例如对于二元分类问题,对N个输入,如果能够将$2^N$种情况都列出来,则称N个输入能够被假设集H shatter。
那么根据break point的定义: $d_{vc} = k-1$。
那么现在,VC bound就跟$d_{vc}$和N有关了。因此,如果一个假设集H的$d_{vc}$确定了,则就能满足机器能够学习的第一个条件$E_{out} \approx E_{in}$。
VC Dimension of Perceptrons
我们在前文推论的都是2D perceptrons。那么在多维情况下呢。我们只要保证存在$d_{vc}$就可以保证机器学习的可行性,而经过推论,我们知道$d_{vc} = d+1$。推论过程
因此,对于多维感知器,我们仍然能确保机器学习的可行性。
但是我们仍然需要注意,我们要选择合适的$d_{vc}$。
Interpreting VC Dimension
我们引入一个$\delta$:

即出现BAD的概率最大不超过$\delta$。重新考虑一下$\epsilon$。
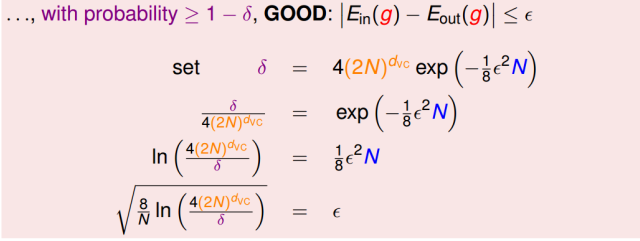
$\epsilon$表现空间H的泛化能力,$\epsilon$越小,泛化能力越大。
同时,我们也可以得到(因为我们更考虑上届):
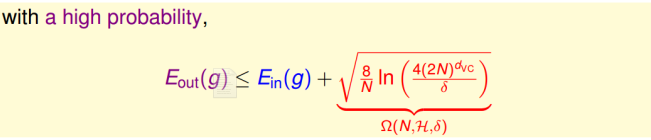
其中第二项是模型复杂度(model complexity),其与样本数量N,假设空间H( $d_{vc}$), $\epsilon$有关。而$E_{out}$、模型复杂度,$E_{in}$与$d_{vc}$的关系为:
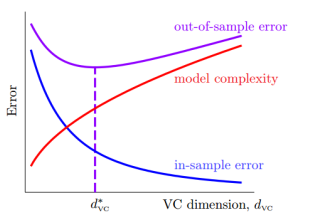
有图可得:
- $d_{vc}$越大,$E_{in}$越小,$\Omega$越大
- $d_{vc}$越小,$E_{in}$越大,$\Omega$越小
- 随着$d_{vc}$增大,$E_{out}$先减小后增大
所以,为了得到合适的$E_{out}$, 我们需要选择合适的$d_{vc}$。
除了$d_{vc}$,还有N会影响到机器学习的能力。当$d_{vc}$给定后,我们的样本数量N可以通过VC bound计算得出。其理论值为$10000d_{vc}$,这是因为VC bound过于宽松了 ,实际上,大概只需要$10d_{vc}$即可。
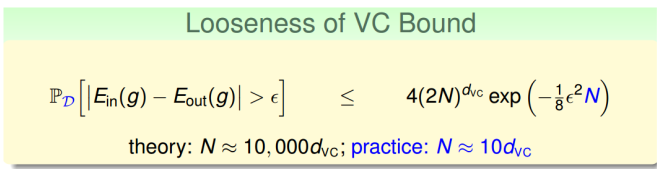
虽然VC bound比较宽松,但是基本上对所有模型的宽松程度是基本一致的,所以,不同模型之间还是可以进行横向比较的。因此 VC bound宽松对机器学习的可行性没有太大影响。
Noise and Error
上文中的证明是在数据集中没有Noise的情况下进行的,但是现实世界中,我们总会存在noise.
- 由于人为因素,正类被误分为负类,或着负类被误分为正类
- 同样特征的样本被模型分为不同的类
- 样本的特征被错误的记录和使用
因此,我们的理想目标f(x)和标签$y_n$很有可能是不一致的。所以,对于一个点,他不是一个确定的,而是一种概率。即对每一个(x, y)出现的概率为$P(y\vert x)$。但是此时VC Dimension仍然成立。
$P(y\vert x)$称之为目标分布(target distribution)。它实际告诉我们最好的选择是多少,同时伴随着多少noise。他可以被看成”ideal mini-target”+noise。比如:
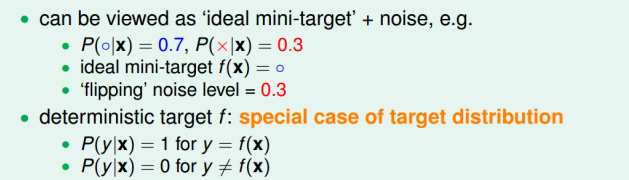
我们的目标就改为了预测”ideal mini-target”, (f(x))。
Error
机器学习考虑的是找出假设函数g与目标函数f有多相近。在前文我们使用$E_{out}$。而实际上g对错误的衡量有三个特性:
- out-of-sample: 样本外的未知数据
- pointwise: 对每个数据点x进行测试
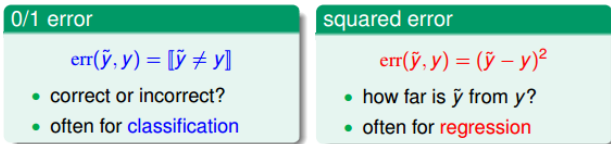
- classification: 看prediction和target是否一致,一般classification error通常称为0/1 error
pointwise error是机器学习中最常用也是最简单的一种错误衡量方式,$E_{in}$和$E_{out}$的表达式为:
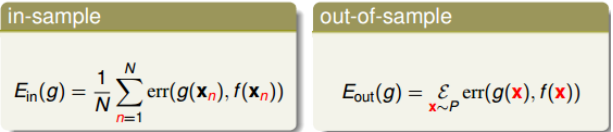
其分类和回归问题的err计算为。
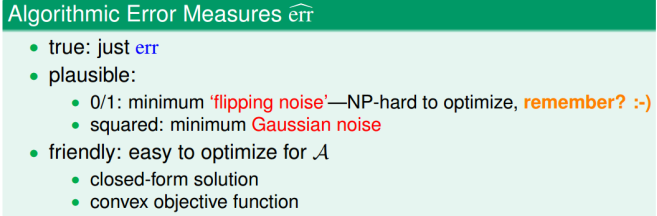
Algorithmic Error Measure
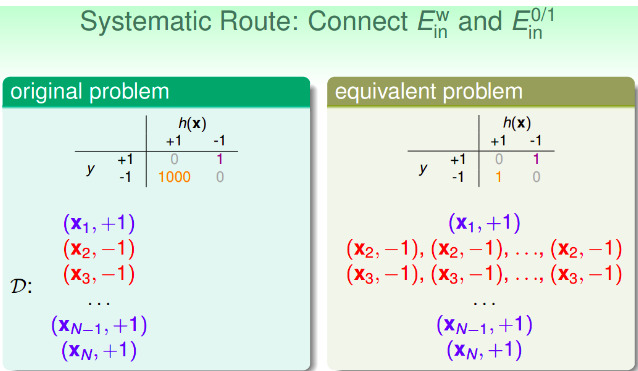
Error有两种,false accept和false reject。
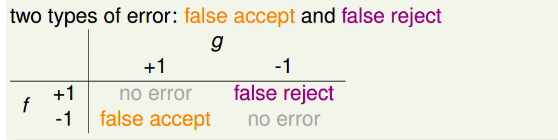
对于不同的错误,在不同的场景中,我们有不同的权重,比如如果是安保系统,那么false accept应该设置的大一些。
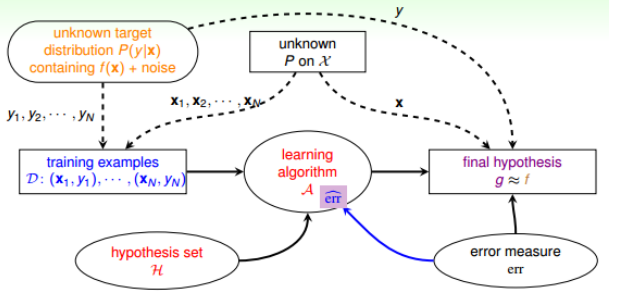
机器学习演算法A的cost function error估计的方法有多种,常用的方法是pausible或者friendly。根据具体情况而定。
引入之后,学习流程图为:
weighted classification
cost function中,false accept和false reject赋予不同的权重,在演算法中体现。对不同权重的错误惩罚,可以选择vitual copying的方法。