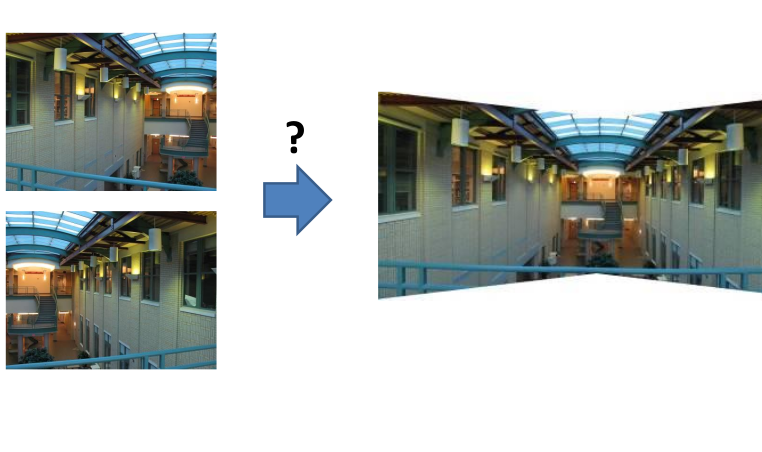
当我们进行图像的匹配之后,我们就可以进行图像的配准了,即,求解两个图像的变换矩阵,之后,我们甚至可以将两个图片合并。
理论基础
在图像的变换和卷绕中,我们已经建立了一个图片经过变换成为另一个图片的过程,事实上,我们在进行图像配准的时候,就是给出了两个图像,让我们判断图像之间的变换关系的过程。
如果图像A经过一些变换能得到图像B,我们只需要计算出这组变换,就可以得到图像的配准,并进行拼接。
所以,寻找图片中与所有匹配项最符合的变换T就是图像配准的过程。
最简单的例子就是平移
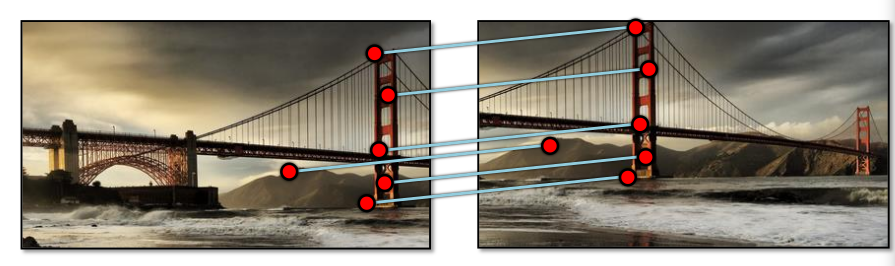
很明显,图片B中的特征点就是图片A中特征点平移的来的。所以,只需要计算出平移量(xt, yt),我们甚至可以将两个图像合成
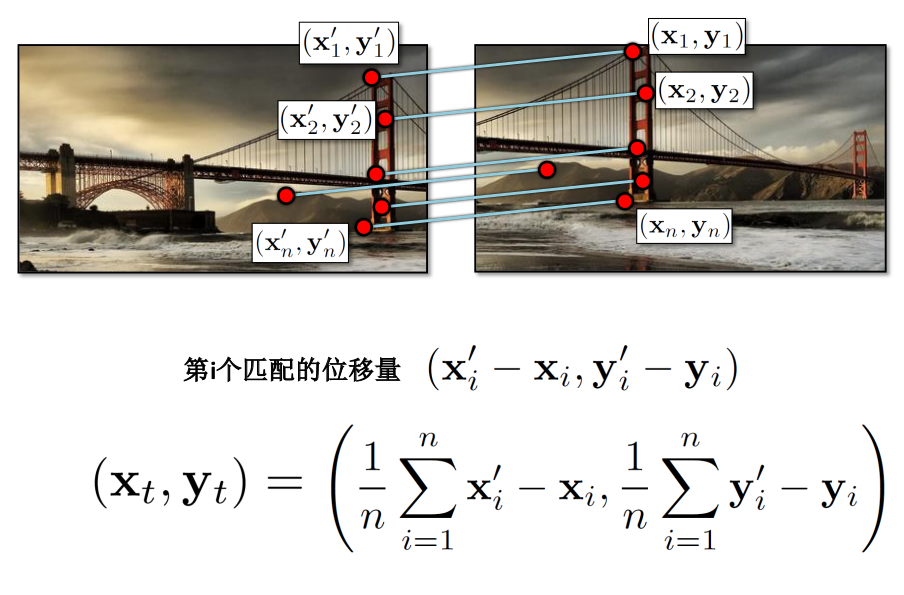
我们可以通过两个图片位置坐标的差值直接获得位移量,但是这十分不恰当(因为图片总不是完全匹配的)
所以,就如图中所说,使用所有匹配点的差值的均值是一个很好的方法。
最小二乘法
对于仿射变换处理使用最小二乘法,这将很好的处理仿射变换,在平移问题,就相当于平均位移量。
从平移说起
对于一组平移图像,我们设其平移为$(X_t, Y_t)$
对于一个点$(X_i, Y_i)$, 我们有
\[X_i + X_t = X_i^{'}\\ Y_i + Y_t = Y_i^{'}\]所以定义残差为
\[r_{xi}(X_t) = (X_i + X_t) - X'_i \\ r_{yi}(Y_t) = (Y_i + Y_t) - Y'_i\]我们对于所有的匹配点求残差,这样,通过保证最小的残差平方和来求解$(X_t, Y_t)$
为了保证平移向量$(X_t, Y_t)$误差足够小,我们就需要保证他拥有最小的残差平方和:
\[C(X_t, Y_t) = \sum_{i=1}^{n}(r_{xi}(X_t)^2 + r_{yi}(Y_t)^2)\]求解平移向量
对于这一过程,我们可以用矩阵表示
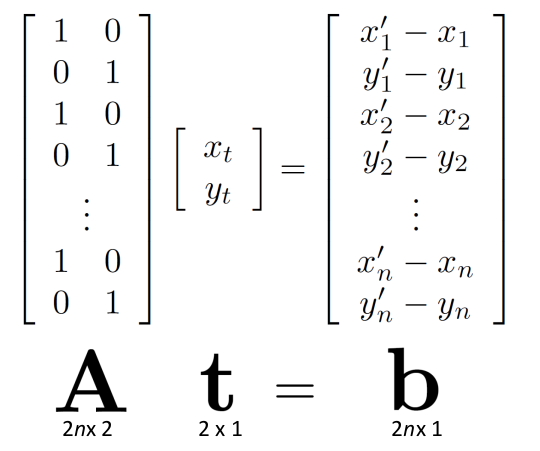
为了保证最小的残差平方和则$\left |At - b \right |^{2}$要保证最小
为了求解t,我们就形成正则方程
对于以上过程,需要注意的是,A是列满秩矩阵,否则,$A_{T}A$逆矩阵是不存在的。
当然对于非列满秩矩阵,我们还有其他方法。
仿射变换
在图像的变换和卷绕时,我们就已经提到过仿射变换, emm,似乎讲的不大清楚。
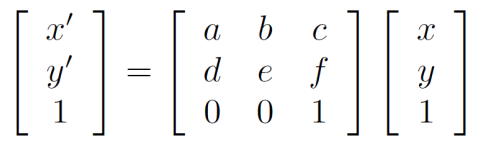
具体的仿射变换矩阵是:
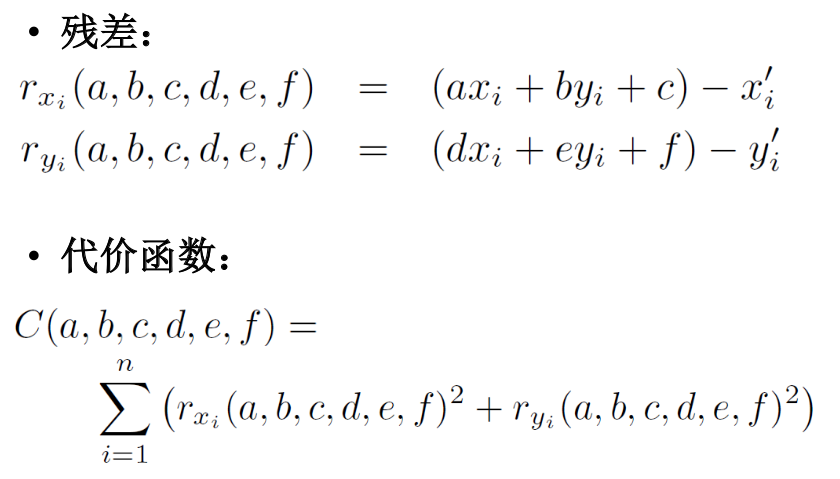
为了求解仿射变换矩阵,我们同样使用最小二乘法来求解问题,定义残差和代价函数,并且将其转换为矩阵形式求解。
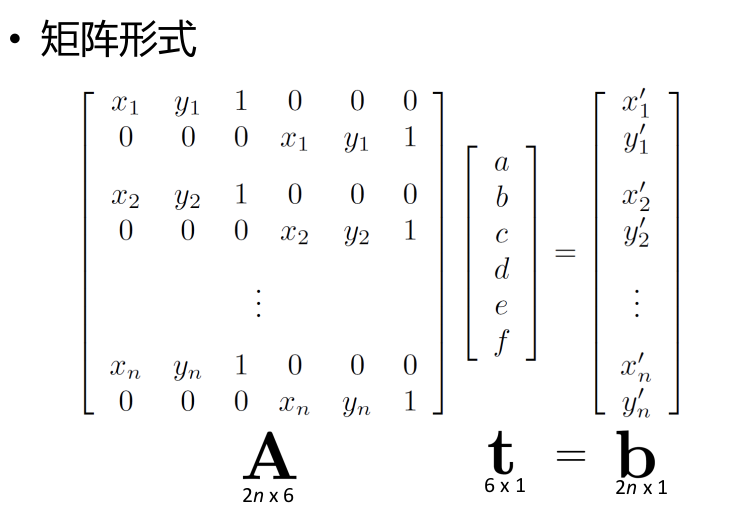
然后,我们就可以通过和平移一样的方法来求解t矩阵。
同态映射(Homographies)
同态映射的矩阵是:
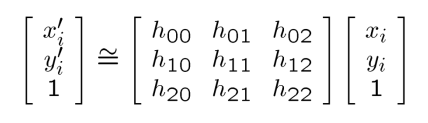
我们按照正常的操作将其展开可以得到

由于上式是非线性的,所以我们将矩阵设为:
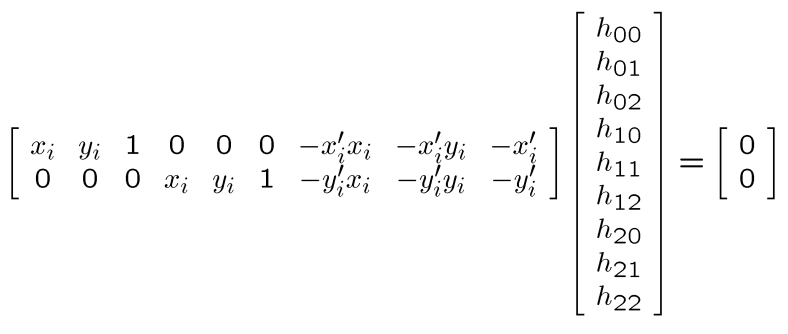
如果我们将这个参数扩展到xn,这时,我们就可以求解H矩阵了:
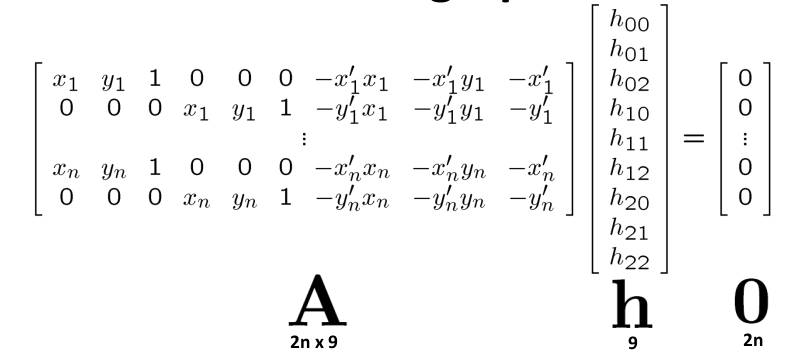
在上述的矩阵运算中即$Ah = 0$:
- 因为h可缩放,因此限定问题的解$\hat{h}$为单位向量
- $\hat{h}$是$A^TA$具有最小特征值的特征向量
- 需要四个或更多匹配点
总结
通过上述的内容,我们明白了如何给两个图像配准对齐。
假定给定图像A和B,我们需要三个步骤
- 计算A和B的图像特征
- 匹配A和B之间的特征
- 使用匹配集计算A到B同态映射矩阵的最小二乘解
RANSAC(随机抽样一致)
在图像匹配的时候,我们就知道,可能存在匹配不正确的点,也就是离群点(outliers)
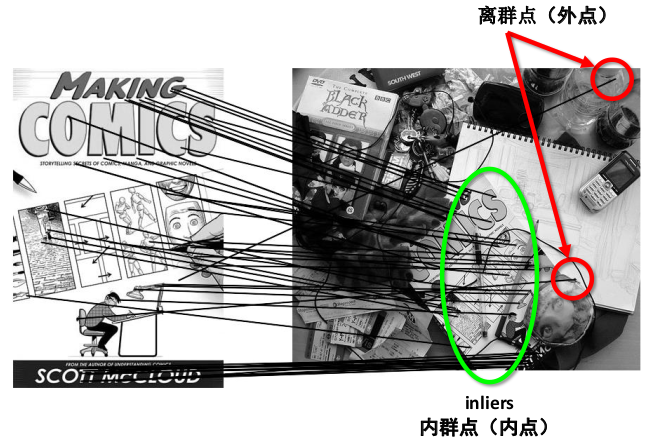
而最小二乘法会去适应包括局外点在内的所有点,比如当我们在平移时求解$X_t$时,我们拟合曲线
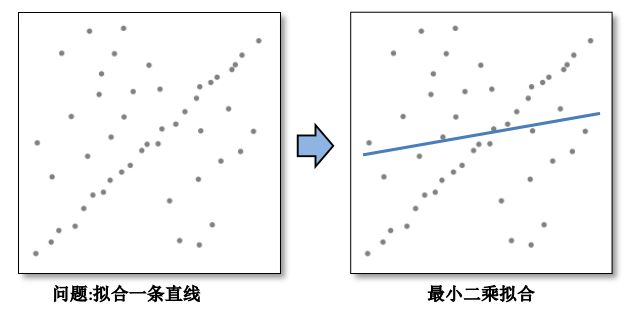
可以看出,拟合的曲线是尽量适配所有点的,所以其结果不太准确。而RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。
RANSAC的基本过程是:
- 随机选择S个样本,同通常S是确定一个模型的最小样本数量。然后我们假设选取的样本全部是局内点。
- 使用S个样本计算模型的一个解。
- 用2求解出的一个模型计算其他所有数据,如果某个点适用于估计的模型,则认为是局内点。如果有足够多的局内点被归类为假设的局内点,则认为估计的模型足够合理
- 回到第一步,重复N次,并保留拥有最多局内点的模型。
- 然后重新使用所有的局内点去估计模型,因为它仅仅被初始的假设局内点估计过。
参数
从基本过程可以看出,RANSAC的正确率与局部点的比例和重复次数有关。我们设:
- q为内点的概率
- S为每次实验使用样本点的数目
- P为最中成功找到正确解的概率
- R为实验轮数
实验轮数
我们可以通过计算来确定实验的轮数R。通过上面的参数我们知道$q^{S}$是S个点均为局内点的概率,$1-q^{S}$是S个点中至少有一个点是局外点的概率,这说明这是一个不好的模型。所以$(1-q^{S})^{R}$表明算法永远不能选到正确解。
因此$1-P = (1-q^{S})^{R}$, 对两边求对数,我们就可以求得实验轮数值:
\[R = \frac{log(1-P)}{log(1-q^{S})}\]通常情况下,我们并不知道P的值,但是我们可以给出一些鲁棒的值(难道是肉眼检测???)。
需要注意的是,这里假设n个点都是独立选择的,所以,当某个点被选定之后,它可能诶后续的迭代过程重新选定,这通常是不合理的,因此推导出的R值被看作是选取不重复点的上限。
为了得到更可信的参数,我们可以定义标准差被加到R上:
\[SD(R) = \frac{\sqrt{1-R^{S}}}{R^{S}}\]实验采样数目
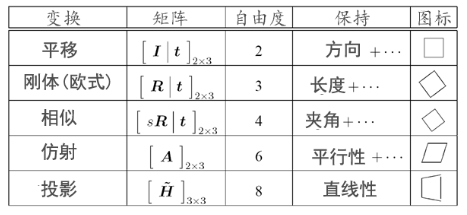
对于不同的变换,我们有不同的采样数目。
优缺点
优点:
- 简单,通用
- 适用于许多不同的问题
- 通常在实践中表现良好
缺点
- 要調整参数
- 有时需要太多的迭代
- 极低局内点时可能失败
- 同常可以比蛮力取样做的更好
Opencv实现
Opencv提供了calib3d模块,我们可以使用其中的cv.findhomography()用于找到两个图片的透视变换。
retval, mask = cv.findHomography(srcPoints, dstPoints, method, ransacReprojThreshold, mask, maxIters, confidence)
参数:
- srcPoints: 原始平面中点的坐标,其类型为CV_32FC2的矩阵或vector
。很奇怪,为什么要双通道呢 - dstPoints:目标平面中点的坐标,类型为CV_32FC2的矩阵或vector
。 - method:用于计算单应矩阵的方法。可选参数:
- 0: 常规方法,最小二乘法
- RANSAC: 基于RANSAC的鲁棒方法
- LMEDS: 最小中值稳健方法
- RHO: 基于PROSAC的鲁棒方法
- ransacReprojThreshold: 将点对视为内部值的最大允许重投影误差(仅在RANSAC和RHO方法中使用)。如果$| \texttt{dstPoints} _i - \texttt{convertPointsHomogeneous} ( \texttt{H} * \texttt{srcPoints} _i) |_2 > \texttt{ransacReprojThreshold} $那么就认为点i是局外点,如果rscPoints和dstPoints以像素为单位,则此参数应在1~10。
- mask:通过可靠的方法(RANSAC或LMEDS)设置的可选输出掩码。请注意,输入掩码值将被忽略。
- maxlters: RANSAC的最大迭代次数
- confidence: 置信度, 介于0和1之间
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
orb = cv.ORB_create()
img1 = cv.imread('resources/yosemite/yosemite1.jpg')
gray1 = cv.cvtColor(img1, cv.COLOR_BGR2GRAY)
kp1, desc1 = orb.detectAndCompute(gray1, None)
img2 = cv.imread('resources/yosemite/yosemite2.jpg')
gray2 = cv.cvtColor(img2, cv.COLOR_BGR2GRAY)
kp2, desc2 = orb.detectAndCompute(gray2, None)
FLANN_INDEX_LSH = 6
index_params= dict(algorithm = FLANN_INDEX_LSH,
table_number = 6, # 12
key_size = 12, # 20
multi_probe_level = 1) #2
search_params = dict(checks=50) # or pass empty dictionary
flann = cv.FlannBasedMatcher(index_params,search_params)
matches = flann.knnMatch(desc1,desc2,k=2)
good = []
for m,n in matches:
if m.distance < 0.7*n.distance:
good.append(m)
src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1, 1, 2)# 双通道
dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
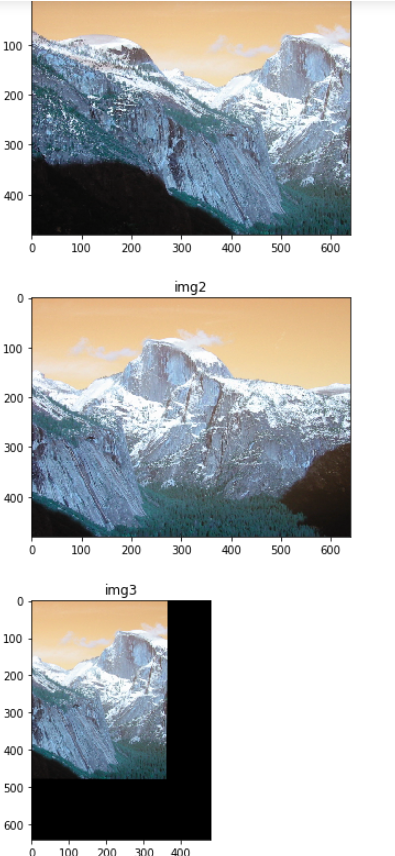
M, mask = cv.findHomography(src_pts, dst_pts, cv.RANSAC, 5.0)
plt.subplot(2, 2, 1)
plt.imshow(img1), plt.title('img1'), plt.show()
plt.subplot(2, 2, 2)
plt.imshow(img2), plt.title('img2'), plt.show()
img3 = cv.warpPerspective(img1, M, img1.shape[:2])
plt.subplot(2, 2, 3)
plt.imshow(img3), plt.title('img3'), plt.show()