图像的变换和卷绕
图像的卷绕就相当与更改了图像的定义域
假设在某一点上f = g(x, y), 则经过了卷绕后,这一点f = g(h(x, y))
线性变化
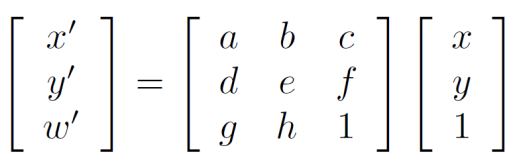
首先了解一下线性变换,对于现行变换,我们可以使用2D矩阵来表示,比如对于某一点P,
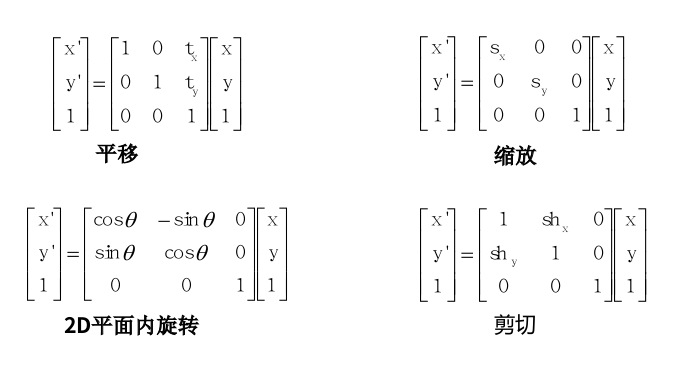
等比缩放
等比缩放矩阵的是一个
所以 x’ = Sx; y’= Sy,
对于上面这一句话的函数, 我们假设变换后的图像为dst, 变换前的图像为src。则dst[x’, y’] = src[x, y]。
也许有一个问题,这样的变换,必然会缺少像素,所以使用相应的算法补全像素是必须的
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
def my_run(img):
height, width = img.shape[:2]
T = [[2, 0], [0, 2]]
img2 = np.zeros((2*height, 2*width))
for x in range(height):
for y in range(width):
p = np.dot(T, [[x], [y]])
# print(p)
x1, y1 = p
x1 = x1[0]
y1 = y1[0]
# 扩大两倍,我就偷懒直接补好了
img2[x1, y1] = img[x, y]
img2[x1-1,y1-1] = img[x, y]
img2[x1,y1-1] = img[x, y]
img2[x1-1,y1] = img[x, y]
return img2
if __name__ == '__main__':
img = cv.imread('img/img.jpg', 0)
img1 = my_run(img)
cv.imwrite('img/img1.jpg', img1)
Opencv实现
cv2.resize()是Opencv提供用来进行等比缩进的函数
dst = cv.resize(src, dsize, dst, fx, fy, interpolation)
参数:
- src: 原图像
- dst: 输出图像
- dsize: 输出图像尺寸,如果为0,则默认为(fxsrc.cols, fysrc.rows)
- fx: 沿x轴的比例因子,为0时,由dsize决定
- fy: 沿y轴的比例因子,为0时,由dsize决定
- interpolation: 插值方法,缩小图像一般使用
INTER_AREA, 放大图像时,一般使用INTER_CUBIC或者INTER_LINEAR见官方文档
旋转
旋转矩阵是(以原点为中心)
如果具体计算一下,即x1 = cosθx-sinθy, y1 = sinθx+cosθy。
对于旋转变换,我们可以从一个像素点说起。
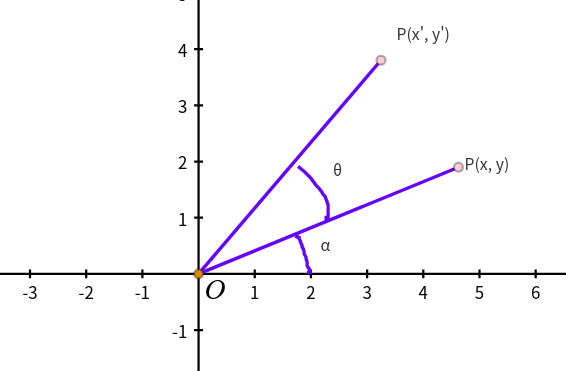
对于一点P, 在图中如P(x, y), 经过逆时针旋转θ
对于(x, y)有
但是对于旋转之后的图形,有
将其分解, 就可以得到

Opencv实现
在Opencv中,实现为了得到这个特殊的矩阵,提供了cv.getRotationmatrix2D()这个函数。需要注意的是,这个函数返回的矩阵是2×3的矩阵,他可以规定旋转中心。
retval = cv.getRotationmatrix2D(center, angle, scale)
参数:
- retval: 返回的旋转矩阵, 2x3矩阵
- center: 旋转的中心点
- angle: 旋转的角度(正值表示逆时针旋转,原点在左上角))
- scale: 各向同性的比例因子
总结
线性变换除了最常用的旋转和缩放,还有镜像
通常线性变换具有以下性质
- 原点映射到原点
- 直线映射到直线
- 平行线保持平行
- 比率被保持
- 线性变换的组合仍是线性变换
平移
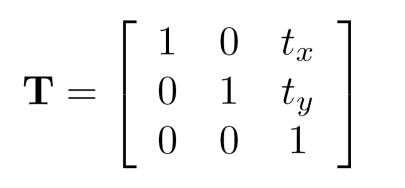
对于平移,假设有平移量为(tx, ty), 则(x1, x2) = (x+tx, y+ty)
单独的2×2的矩阵是无法实现平移操作的,我们需要一个2×3的矩阵,其基本样式为
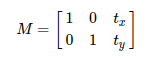
其中tx和ty就代表着平移的量
但是一个2×3的矩阵和1×2的矩阵几乎无法运算得到(x+tx, y+ty),所以我们扩展为齐次坐标,这个理由在后面。
仿射变换
了解仿射变换,我们先从了解齐次坐标开始。
齐次坐标
如果我们给(x, y)添加一个坐标,使其成为(x, y, w), 这就是一个齐次坐标。
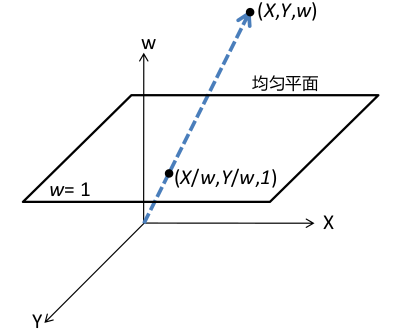
我们从齐次坐标变为原坐标也十分简单,即(x, y, w)->(x/w, y/w)。
为了进行坐标的变换,则变换矩阵也变成了一个3×3的矩阵,比如平移矩阵变为了(可以自行计算以下,最后的变换格式就成了[x+tx, y+ty, 1])
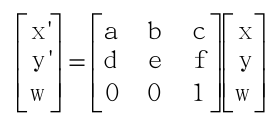
所以,我们规定任何最后一行为[0 0 1]的3x3 矩阵表示的转换称为仿射变换。
之所以引入齐次坐标是为了更加便利的计算。仿射变换是由平移和线性变换组成的,而在前面提到平移矩阵是一个2×3的矩阵,而旋转矩阵是一个2×2的矩阵,这样子是无法进行组合的,所以,我们对其进行了扩展,也就产生了齐次坐标。
基本的仿射变换
但是需要注意的是,在Opencv里实现,仍然要给cv.warpAffine()一个2×3的矩阵,而不是仿射矩阵,实际上,将仿射矩阵的最后一行抛弃就是2×3的矩阵了。
举例说明(旋转矩阵的由来)
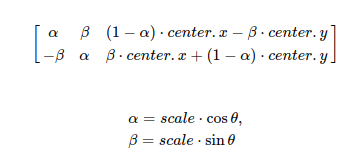
一般的旋转矩阵T = [[cosθ, -sinθ], [sinθ, cosθ]],是以原点为中心的旋转,但是在实际应用中,我们希望指定原点的位置。
为此Opencv提供了cv.getRotationMatrix2D()函数用于返回一个2×3的矩阵,规定中心点。这实际上就是平移和原始旋转的结合。
我们先将旋转中心移至中心,然后进行旋转,之后在进行平移即可。
性质
仿射变换是线性变换和平移的组合。
这样就可以说线性变换没有组合平移的仿射变换,平移是没有进行线性变换的仿射变换。
如图,大概就经历了旋转,平移,缩放三种变换的组合
性质:
- 原点不一定映射到原点
- 直线映射到直线
- 平行线保持平行
- 保持比率
- 仿射变换的组合是仿射变换
Opencv实现
由于得到仿射变换矩阵的算法过于麻烦,所以Opencv提供了一种更为简单的方式。
我们只需要原图像的三个点及其在输出图像中的对应位置,然后cv.getAffineTransform()就可以得到一个2×3的仿射矩阵。
之后使用cv.warpAffine()就可以得到变换
retval=cv.getAffineTransform(src, dst)
参数:
- retval: 返回的2×3矩阵
- src: 原图像的三个点的坐标
- dst: 与原图像想对应的三个点的坐标
然后我们通过生成的这个函数就可以通过cv.warpAffine()进行仿射变换
dst = cv.warpAffine(src, M, dsize, dst, flages, borderMode, borderValue)
我们为cv.warpAffine()提供一个矩阵M, 当设置flags=cv.WARP_INVERSE_MAP时, 该函数就使用公式将其转换 即: dst(x,y)=src(M11x+M12y+M13,M21x+M22y+M23), 也就是说是一个逆过程。如果没有设置,则需要提供正常进行的矩阵。
具体参阅文档官方
参数:
- src: 原图像
- M:2*3旋转矩阵
- dsize: 输出图像的尺寸,其形式应为(width, height)
- flags: 插值方法和可选标志WARP_INVERSE_MAP的组合,
- borderMode:像素外推法,当borderMode=BORDER_TRANSPARENT时,表示目标图像中与原图像中的’离群值’相对应的像素未被函数修改
- borderValue: 在边界不变的情况下使用的值;默认情况下为0。
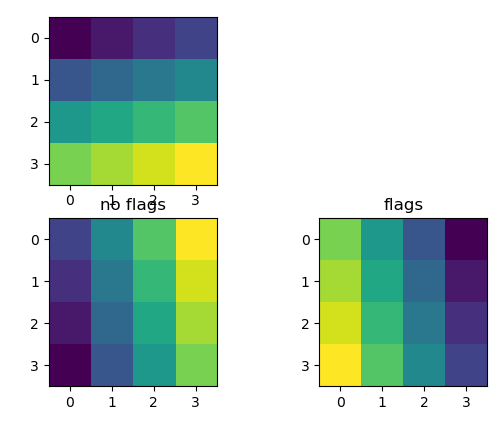
我们通过旋转矩阵来进行实例说明
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
def rotation(img, flag = 0):
height, width = img.shape[:2]
# print(height, width)
M = cv.getRotationMatrix2D(((width-1)/2.0, (height-1)/2.0), 90, 1)
# print(M)
if flag:
dst = cv.warpAffine(img, M, (width, height), flags = cv.WARP_INVERSE_MAP)
else:
dst = cv.warpAffine(img, M, (width, height))
# print(dst)
return dst
if __name__ == '__main__':
# img = cv.imread('img/img.jpg', -1)
img = np.arange(200, 216).reshape(4, 4)
img = img.astype(np.uint8)
img1 = rotation(img)
img2 = rotation(img, 1)
# 设置flags
plt.subplot(221)
plt.imshow(img)
plt.subplot(223)
plt.imshow(img1)
plt.title("no flags")
plt.subplot(224)
plt.imshow(img2)
plt.title("flags")
plt.show()
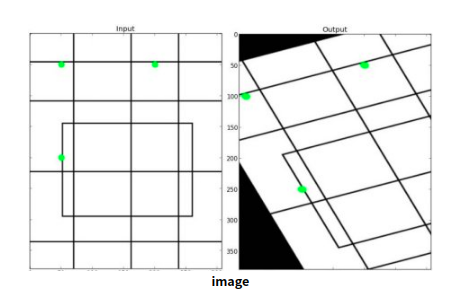
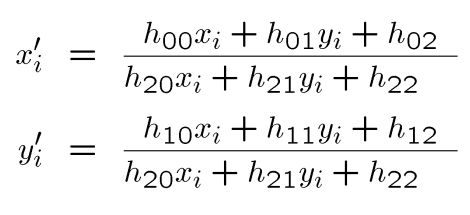
投影变换
投影变换又名透视变换、Homographies(同态映射,单应映射)
在最开始的图片,就是一个同态映射
其矩阵为:
同时他还有另外一种表示方式:
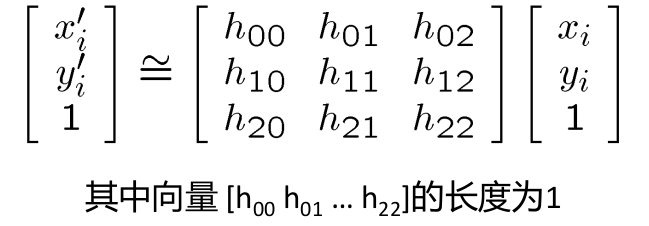
即:
性质:
- 原点不一定映射到原点
- 直线映射直线
- 平行线不一定保持平行
- 不保持比率
- 投影变换的组合仍是投影变换
Opencv实现
Opencv提供了一个warpPerspective()函数用于处理单应映射。
dst = cv.warpPerspective(src, M, disize, dst, flags, borgerMode, borderValue)
参数:
- src: 原图像
- dst: 输出图像,其大小为dsize
- M: 3*3投影矩阵
- dsize: 输出头像的矩阵
- flags: 差值方法和可选标志的组合,一般为
WARP_INVERSE_MAP,此时,图像变换以上述理论计算。否则,应先使用invert反转转换。 - borderMode: 像素外推法, 一般为
BORDER_CONSTANT或BORDER_REPLICATE - borderValue: 在外界不变的情况下使用的值, 默认为0.